Του Αρχιπλοιάρχου ε.α. Ευσταθίου Νικολάου Π.Ν., Αεροναυπηγού-Ηλεκτρολόγου Μηχανικού
Στο προηγούμενο άρθρο νο 2 διατυπώθηκε ο λόγος υπάρξεως της σύντηξης η οποία ανήκει στις διαδικασίες ΜΤΤ. Συγκεκριμένα στα πλαίσια της Διαχείρισης των Ιχνών και αμέσως μετά την λειτουργία της συνδέσεως ίχνους με ίχνος (track to track association) το σύστημα θα πρέπει να αποφασίσει εάν: «δύο ή περισσότερα ίχνη αναπαριστούν το ίδιο αντικείμενο και εάν πρέπει ή δεν πρέπει να συνδυασθούν σε ένα κοινό ίχνος- στόχο».
Κατά την διαδικασία της Σύνδεσης ίχνους με ίχνους (track to track association) «εξετάζεται και αποφασίζεται εάν δύο ίχνη αναπαριστούν το ίδιο φυσικό αντικείμενο».
Κατά την διαδικασία της Σύντηξης (Fusion) «για τον ίδιο στόχο ήδη διαθέτουμε δύο ή περισσότερα βεβαιωμένα ίχνη από διάφορους αισθητήρες και η προσπάθεια μας έγκειται στο να συνδυασθούν αυτά τα ίχνη σε ένα κοινό ίχνος – στόχο με καλύτερη ακρίβεια».
Αρχιτεκτονικές Σύντηξης
Η σύντηξη από πλευράς μηχανισμού (αλγόριθμου) μπορεί να είναι είτε ένα Kalman filter ή ένα ΙΜΜ filter ή ένα MMAE filter τα οποία επεξεργάζονται τοπικές και εξωτερικές μετρήσεις από άλλους αισθητήρες και άλλες πλατφόρμες ή όπως θα παρουσιασθεί στα επόμενα κάποιος πιο εξελιγμένος αλγόριθμος.
- Εάν τα ίχνη των στόχων προέρχονται από τον ίδιο αισθητήρα, η σύντηξη αναφέρεται ως «Σύντηξη σε επίπεδο αισθητήρα – Sensor Track Fusion».
- Εάν προέρχονται από διαφορετικούς αισθητήρες της ίδιας πλατφόρμας η σύντηξη αναφέρεται ως «Σύντηξη σε επίπεδο Συστήματος – System Track Fusion».
- Εάν τα ίχνη προέρχονται από δύο ή περισσότερες πλατφόρμες, η σύντηξη αναφέρεται ως «Σύντηξη σε επίπεδο Δικτύου – Network Track Fusion» ή «Σύντηξη πολλαπλών στόχων – Multisensor Multiplatform Track Fusion».
Διακρίνονται δύο μεγάλες κατηγορίες αρχιτεκτονικών Σύντηξης:
1. Η Κεντρικοποιημένη Σύντηξη (Centralized) με ή χωρίς τοπική επεξεργασία από τους τοπικούς αισθητήρες. Στην Κεντρικοποιημένη Σύντηξη χωρίς τοπική επεξεργασία ο κάθε αισθητήρας επικοινωνεί και αποστέλλει απ’ ευθείας σε κάποιο κόμβο Σύντηξης τις μετρήσεις του, όπου γίνεται η σύντηξη και η παραγωγή της κοινής εκτίμησης και συνδιακύμανσης του στόχου. Η δομή αυτή είναι γνωστή ως Σύντηξη Μετρήσεων. 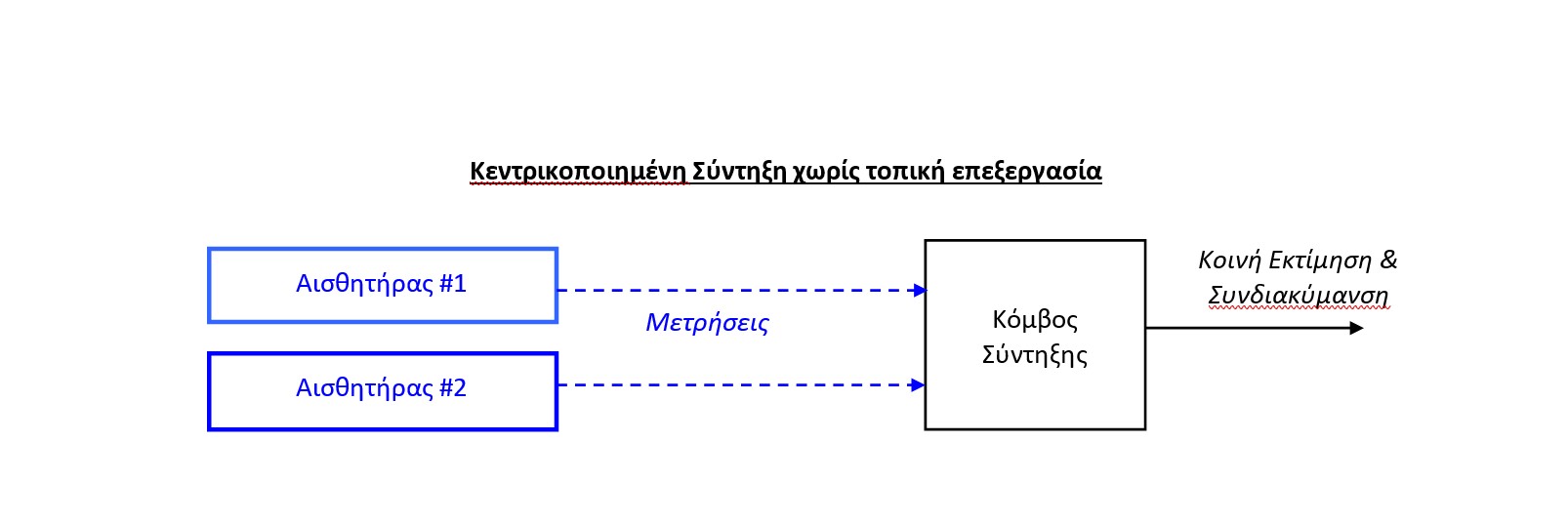
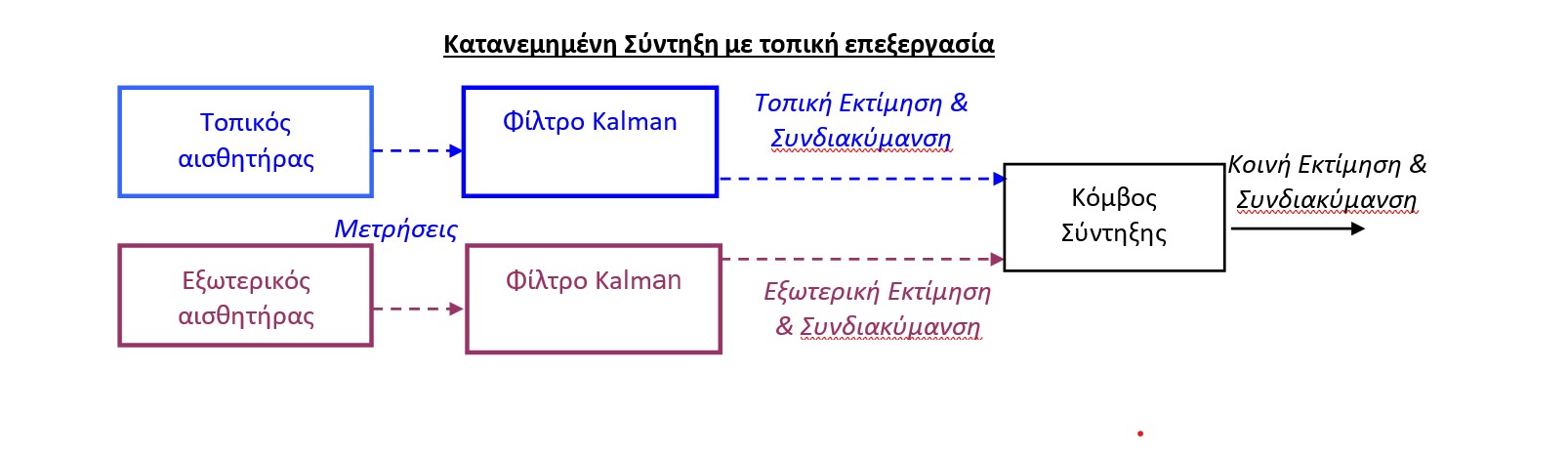
Στην Κεντρικοποιημένη Σύντηξη με τοπική επεξεργασία ο κάθε αισθητήρας παράγει την δική του Εκτίμηση και Συνδιακύμανση για τον στόχο και ο Κόμβος Σύντηξης αναλαμβάνει τον υπολογισμό της Κοινής Εκτίμησης και Συνδιακύμανσης.
Σημ. Η Συνδιακύμανση (Covariance) είναι όρος της θεωρίας Πιθανοτήτων και στην ουσία αναφέρεται στα πιθανολογικά σφάλματα των μεταβλητών ενός στόχου και των μετρήσεων.
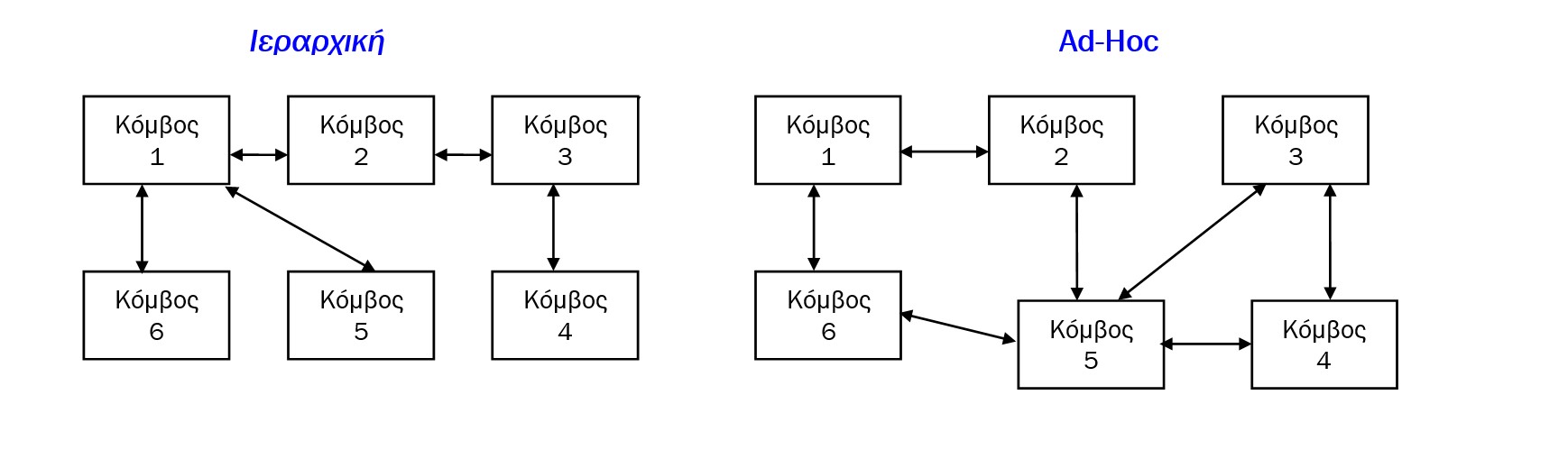
2. Η Κατανεμημένη Σύντηξη (Distributed). Το παρακάτω σχήμα παρουσιάζει τις απλουστευμένες βασικές δομές της Κατανεμημένης Σύντηξης. Στην δομή Πλήρους συνδέσεως όλοι οι Κόμβοι Σύντηξης επικοινωνούν μεταξύ τους με βάση κάποια χρονική κατανομή σειριακής επικοινωνίας. Θεωρητικά όλοι οι κόμβοι σύντηξης έχουν τις ίδιες πληροφορίες. Όταν όμως διακοπεί η επικοινωνία δύο κόμβων, η υπόθεση ότι όλοι οι κόμβοι έχουν τις ίδιες πληροφορίες δεν ισχύει πλέον. Η δομή αυτή χρησιμοποιείται από το Cooperative Engagement Concept (CEC). Στην δομή Δέντρου για κάθε ζευγάρι κόμβων υπάρχει μόνο μία σύνδεση χωρίς εναλλακτική οδό επικοινωνίας.
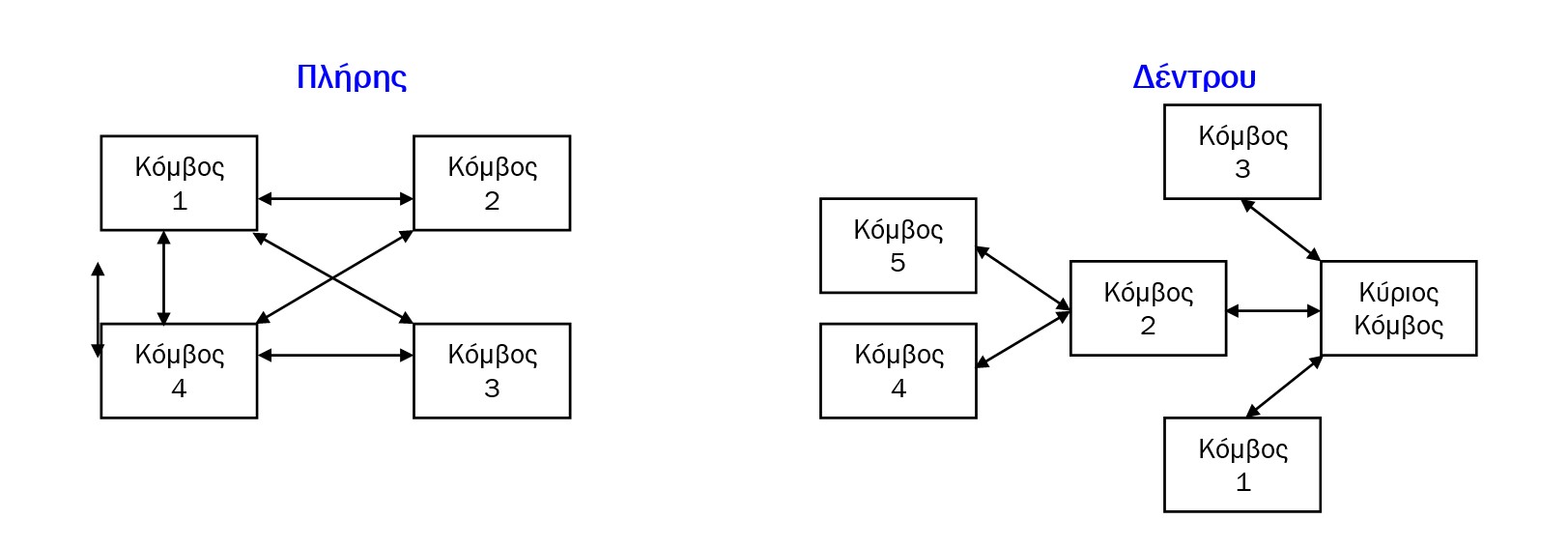
Στην Ιεραρχική Σύντηξη ανατίθενται διαφορετικές αποστολές σε κάθε Κόμβο. Υπάρχει ένας κεντρικός κόμβος π.χ. ο #1 στον οποίο καταλήγουν όλες οι πληροφορίες. Η δομή αυτή είναι στην πράξη μία εναλλακτική δομή της Σύντηξης Δέντρου όπου επίσης ισχύει ότι υπάρχει μόνο μία σύνδεση χωρίς εναλλακτική οδό επικοινωνίας. Στην δομή ad–hoc δεν υπάρχει κάποια συγκεκριμένη δομή. Είναι δυνατή οιαδήποτε σύνδεση, γεγονός που επιτρέπει την εκάστοτε προσαρμογή προς το διατιθέμενο επικοινωνιακό δίκτυο.
Ένα από τα σοβαρότερα προβλήματα που εμφανίζονται στην Κατανεμημένη Σύντηξη είναι το φαινόμενο της «περίσσειας πληροφορίας» ή με κάποιους άλλους χαρακτηρισμούς «η μετάδοσης διαδόσεων» ή του «ψιθυρίσματος στον διάδρομο». Το πρόβλημα αυτό αποδίδεται πιο κατανοητά μέσω του παρακάτω παραδείγματος:
Παράδειγμα Περίσσειας Πληροφορίας
Έστω ότι ένας κόμβος σύντηξης (π.χ. ο #1) εντοπίζει μέσω ενός σόναρ ένα ασθενές ίχνος το οποίο πιθανόν να προέρχεται από κάποιο «υποβρύχιο στόχο». Σχηματίζει την υπόθεση ότι «υπάρχει μία υποβρύχια απειλή» και την εκπέμπει στο δίκτυο επικοινωνίας (data link). Ένας άλλος κόμβος (π.χ. ο #5) ο οποίος δεν διαθέτει αισθητήρες αλλά μόνο βιβλιοθήκη υποβρυχίων απειλών λαμβάνει την πληροφορία, «σημειώνει πιθανή ύπαρξη υποβρύχιας απειλής» και η τρέχουσα τακτική κατάσταση πιθανότατα του επιτρέπει να σχηματίσει και να εκπέμψει στο δίκτυο μία «υπόθεση χαμηλής πιθανότητας» για μία υποβρύχια απειλή. Ο κόμβος #1 λαμβάνει υπόψη του τόσο αυτή την «χαμηλής πιθανότητας υπόθεση» του κόμβου #5 που λέει ότι «υπάρχει υποβρύχια απειλή» καθώς και τα στοιχεία από το δικό του σόναρ που επιβεβαιώνουν την υπόθεση. Ο Κόμβος #1 δεν μπορεί να αντιληφθεί ότι η ληφθείσα υπόθεση βασίζεται στα στοιχεία του δικού του αισθητήρα και θεωρεί ότι είναι μια νέα ανεξάρτητη επιβεβαίωση των στοιχείων του δικού του σόναρ. Αποτέλεσμα αυτού είναι να προάγει την εν λόγω υπόθεση σε «υπόθεση υψηλής αξιοπιστίας» και να την εκπέμψει στο δίκτυο. Ο κόμβος #5 λαμβάνει την νέα «υψηλής αξιοπιστίας υπόθεση», την θεωρεί ως επιβεβαίωση της δικής του «υπόθεσης χαμηλής πιθανότητας» και σαν αποτέλεσμα αυτού προτείνει επιθετική αντιμετώπιση της απειλής.
Για αυτά τα προβλήματα καθώς και πολλά άλλα παρόμοιας φύσης δημιουργούνται κατά περίπτωση ειδικοί αλγόριθμοι απαλοιφής ή διευκρινίσεως της καταστάσεως.
Έχει αποδειχθεί ότι η παρακολούθηση στόχων με βάση την Κεντρικοποιημένη σύντηξη είναι πολύ πιο ακριβής από την αντίστοιχη Κατανεμημένη. Εντούτοις όταν ο αριθμός των συνεργαζομένων αισθητήρων αλλά και στόχων είναι μεγάλος, η Κεντρικοποιημένη αρχιτεκτονική δεν μπορεί – λόγω επικοινωνιακών περιορισμών – να διαχειρισθεί μεγάλες ποσότητες στοιχείων και παράλληλα να εκτελέσει πολύπλοκους υπολογισμούς.
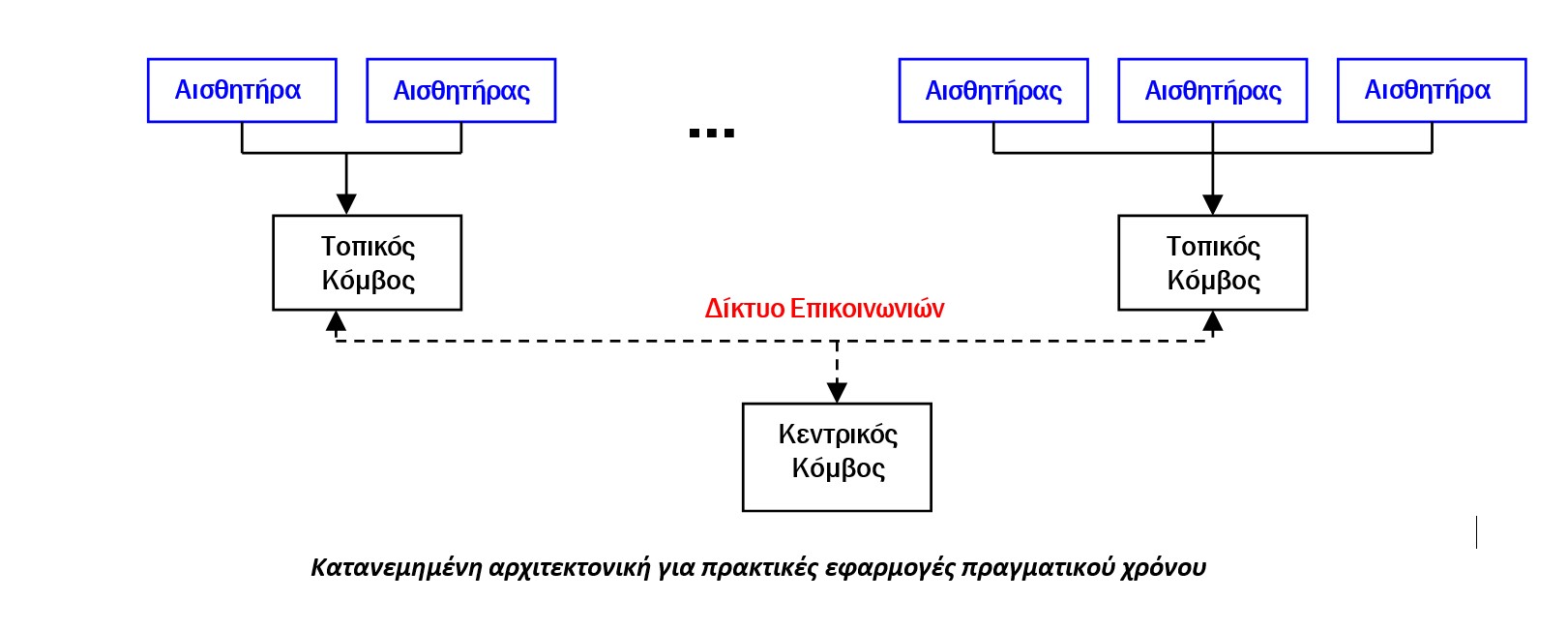
Για πρακτικές εφαρμογές πραγματικού χρόνου (real time) η κατανεμημένη αρχιτεκτονική του παρακάτω σχήματος είναι η πλέον ενδεδειγμένη για την διαχείριση των επικοινωνιακών φορτίων, της υπολογιστικής πολυπλοκότητας και παράλληλα είναι ανθεκτική σε βλάβες των επιμέρους κόμβων διότι είναι δυνατή η ανακατανομή των αισθητήρων σε άλλους κόμβους.

Σφάλματα Σύντηξης
Τα σπουδαιότερα σφάλματα που παρουσιάζονται κατά τις διαδικασίες Σύντηξης σε περιπτώσεις εφαρμογής σε συστήματα ΜΤΤ οφείλονται:
- Κατά κύριο λόγο στο κοινό σύστημα αναφοράς και ονομάζονται σφάλματα καταγραφής (Registration errors). Οι βασικές αιτίες των σφαλμάτων καταγραφής είναι η μη απόλυτη ευθυγράμμιση των αξόνων μετρήσεως των διαφόρων αισθητήρων, τα σταθερά σφάλματα μετρήσεως αποστάσεως & γωνίας (bias) και τα σφάλματα θέσεως των αισθητήρων
- Ο μη κοινός χρόνος λήψεως των μετρήσεων από τους διάφορους αισθητήρες
- Ο κοινός θόρυβος διαδικασίας (το θέμα αυτό περιγράφεται σε επόμενη παράγραφο)
- Η παράθλαση και το ducting των ραντάρ
- Η μετατροπή των μετρήσεων από πολικές (μετρήσεις ραντάρ) σε καρτεσιανές συντεταγμένες
Συνήθως στην συνολική διαχείριση στόχων σε επίπεδο δικτύου (Network Level) οι διάφοροι αισθητήρες από διαφορετικές πλατφόρμες παρέχουν στοιχεία στόχων και ιχνών (targets & tracks) και στην συνέχεια με την βοήθεια των τεχνικών Συνδέσεως (track to track association) και Συντήξεως (track fusion) δημιουργείται το κεντρικό αρχείο ιχνών. Μετά την διαδικασία αναγνώρισης ταυτότητας και απόδοσης αριθμού στόχου το αρχείο ιχνών μετατρέπεται σε αρχείο στόχων (Network level target file). Αυτή όμως η προσέγγιση δεν είναι προτιμητέα διότι η διακίνηση μετρήσεων αυξάνει κατά πολύ τις επικοινωνιακές ανάγκες του δικτύου σε σχέση με την διακίνηση των στοιχείων των στόχων και των ιχνών.
Με δεδομένο ότι οι αισθητήρες παρέχουν στοιχεία στόχων, το κέντρο σύντηξης (track fusion center) κατ’ αρχάς εκτελεί την διαδικασία Συνδέσεως Ιχνών – Track to track association για να καθορίσει «ποια ίχνη στόχων (state vectors) που έχουν ληφθεί από τις διάφορες πλατφόρμες ή αισθητήρες αντιστοιχούν στο ίδιο φυσικό αντικείμενο».
Στην συνέχεια εκτελεί την διαδικασία της Σύντηξης, δηλαδή συλλέγει από τις πλατφόρμες τα ανύσματα των μεταβλητών (state vectors) των στόχων καθώς και τους Πίνακες Συνδιακύμανσης (covariance matrices) για όλους τους στόχους που προήλθαν από την διαδικασία συνδέσεως (track to track association) και αφού «αναγάγει την θέση τους σε ένα κοινό χρόνο t», τα συνδυάζει προκειμένου να δημιουργήσει ένα κοινό συνθετικό ίχνος (common composite track) για κάθε ένα στόχο στον συγκεκριμένο χρόνο t.
Αυτοί οι συνθετικοί στόχοι συντήκονται (fused) σε κάθε κύκλο και δεν χρησιμοποιούνται ποτέ κατά την διαδικασία συνδέσεως (track to track association) στον επόμενο κύκλο ενημέρωσης του συστήματος.
Σημειώνεται ότι η Σύντηξη στόχων απαιτεί την διάθεση των πλήρων στοιχείων των στόχων δηλαδή τόσο τα ανύσματα των μεταβλητών τους (state vectors) όσο και τους Πίνακες Συνδιακύμανσης (Covariance matrices) που παράγονται από τα φίλτρα παρακολουθήσεως. Κατά συνέπεια πλατφόρμες που χρησιμοποιούν φίλτρα α-β για την παρακολούθηση στόχων δεν μπορούν να συμμετάσχουν ενεργητικά στην διαδικασία της Σύντηξης διότι τα φίλτρα α-β δεν παράγουν Πίνακες Συνδιακύμανσης. Επισημαίνεται ότι η Σύντηξη, όπως θα παρουσιασθεί παρακάτω, εκτός από παρακολούθηση στόχων δυνατόν να χρησιμοποιηθεί και για άλλους σκοπούς όπως π.χ. αναγνώριση στόχων.
ΝΑΥΤΙΚΗ ΤΕΧΝΟΛΟΓΙΑ: Μέρος 2, Διαδικασίες Παρακολούθησης Πολλαπλών Στόχων
Αλγόριθμοι Σύντηξης
Οι αλγόριθμοι Σύντηξης διακρίνονται σε τέσσερεις (4) βασικές κατηγορίες:
Κατηγορία #1: Οι αλγόριθμοι που βασίζονται στην θεωρία Πιθανοτήτων και ειδικότερα στην θεωρία των φίλτρων Kalman, IMM και MMAE.
Ο όρος αυτός συνήθως αναφέρεται σε τρεις διαφορετικές προσεγγίσεις Σύντηξης:
Α. Σύντηξη Μετρήσεων (Measurement Fusion)
Στην προσέγγιση αυτή φιλτραρισμένες (με Kalman ή ΙΜΜ) μετρήσεις στόχων (π.χ. διοπτεύσεις, αποστάσεις) από τοπικούς και εξωτερικούς απομεμακρυσμένους αισθητήρες συλλέγονται σε κάποιο κεντρικό κόμβο όπου συνδυάζονται προκειμένου να παραχθούν οι εκτιμώμενες θέσεις των στόχων. Η προσέγγιση αυτή αφ’ ενός μεν απαιτεί επικοινωνιακό δίκτυο με μεγάλες ταχύτητες μεταδόσεως στοιχείων και αφ’ ετέρου μεταθέτει όλο το φορτίο υπολογισμών στον κεντρικό κόμβο. Στον κεντρικό κόμβο οι εισερχόμενες μετρήσεις οι οποίες θεωρούνται ως «μετρήσεις κάποιου αισθητήρα» και οι τοπικές θέσεις (δηλαδή αυτές του κεντρικού κόμβου) εισέρχονται σε ένα μηχανισμό σύντηξης (π.χ. φίλτρο Kalman ή ΙΜΜ) προκειμένου να υπολογισθούν οι βέλτιστες εκτιμώμενες θέσεις. Η Σύντηξη Μετρήσεων είναι η βέλτιστη (optimal) διαδικασία αλλά λόγω μεγάλου όγκου διακινουμένων πληροφοριών είναι πρακτικά ανεφάρμοστη. Αντίθετα οι μέθοδοι Σύντηξης στοιχείων στόχων, όπως οι παρακάτω περιγραφόμενες, είναι υποβέλτιστες (suboptimal) διαδικασίες αλλά πρακτικά εφαρμόσιμες.
Β. Απλή Σύντηξη (Simple Fusion or State Vector Fusion or Singer Fusion)
Στην προσέγγιση αυτή οι τοπικοί (local L) και οι απομεμακρυσμένοι κόμβοι (remote R) επεξεργάζονται με Kalman ή ΙΜΜ Filters τις μετρήσεις των δικών τους αισθητήρων τους και παράγουν αντίστοιχα τις δικές τους εκτιμώμενες θέσεις των στόχων xL (local) και xR (remote) καθώς και τους αντίστοιχους πίνακες Συνδιακύμανσης Σφάλματος – Error Covariance, PL και PR που αποστέλλονται στο κέντρο σύντηξης.
Στην συνέχεια στο κέντρο σύντηξης υπολογίζει την συνδυασμένη κοινή εκτιμώμενη θέση και τον πίνακα Συνδιακύμανσης (Covariance). Η Απλή Σύντηξη βασίζεται στην υπόθεση ότι «οι κοινοί στόχοι που παράγονται από τους τοπικούς και τους απομεμακρυσμένους κόμβους είναι μη συσχετιζόμενοι (uncorrelated) και κατά συνέπεια μπορούν να χρησιμοποιηθούν σε ένα κοινό Kalman Filter (στον κόμβο που γίνεται η απλή σύντηξη) για να παραχθούν οι εκτιμώμενες από την σύντηξη θέσεις (fused estimates)».
Όπως προαναφέρθηκε η Απλή Σύντηξη είναι πρακτικά εφαρμόσιμη αλλά είναι υποβέλτιστη λύση (suboptimal) διότι η υπόθεση ότι οι κοινοί στόχοι είναι μη συσχετιζόμενοι (uncorrelated) δεν ισχύει και ένα Kalman Filter – που λειτουργεί ως μηχανισμός σύντηξης – απαιτεί μετρήσεις μη συσχετιζόμενες στον χρόνο (time uncorrelated). Ο λόγος για τον οποίο οι κοινοί στόχοι είναι συσχετιζόμενοι στον χρόνο είναι ένα πρόβλημα που εμφανίζεται σε όλες σχεδόν τις μεθόδους σύντηξης και ονομάζεται κοινός θόρυβος διαδικασίας (common process noise). Ο θόρυβος αυτός παράγεται από την δυναμική κίνηση του στόχου και γίνεται ταυτόχρονα αντιληπτός από όλους τους αισθητήρες που βλέπουν αυτόν τον ίδιο στόχο. Συνεπώς οι μετρήσεις των διαφόρων αισθητήρων έχουν κάποια κοινά στοιχεία, είναι δηλαδή χρονικά συσχετισμένες (time correlated measurements). Σημειώνεται ότι για την Απλή Σύντηξη έχουν αναπτυχθεί και συνεχώς αναπτύσσονται νέες αλλά παρόμοιες μέθοδοι που βασίζονται στην λογική των φίλτρων Kalman.
Γ. Σύντηξη με κατανεμημένου βάρους Συνδιακύμανση (Weighted Covariance Fusion)
Προκειμένου να απαλειφθούν τα προαναφερθέντα προβλήματα του κοινού θορύβου διαδικασίας (common process noise) έχει αναπτυχθεί η Σύντηξη με κατανεμημένου βάρους Συνδιακύμανση – Weighted Covariance Fusion η οποία λαμβάνει υπόψη της τόσο την συσχέτιση των μετρήσεων που προκαλείται από τον κοινό θόρυβο διαδικασίας όσο και κάποιο επιπλέον πίνακα Διασυνδιακύμανσης σφαλμάτων – Error Cross Covariance τα οποία στην ουσία είναι τα σφάλματα εκτιμήσεως στους τοπικούς και απομακρυσμένους κόμβους. Ο εν λόγω πίνακας συμπεριλαμβάνει και την συσχέτιση των μετρήσεων που προκαλούνται από τον κοινό θόρυβο διαδικασίας (common process noise). Σημειώνεται ότι χωρίς τον πίνακα Διασυνδιακύμανσης (Cross Covariance), η Κατανεμημένου Βάρους Σύντηξη απλοποιείται σε Απλή Σύντηξη.
Απόφαση Επιλογής του τρόπου Σύντηξης
Πολλές φορές η χρήση της σύντηξης κατανεμημένου βάρους, λόγω του υπολογιστικού φορτίου, δεν αξίζει την προσπάθεια διότι και η απλή σύντηξη παρουσιάζει το ίδιο ικανοποιητικά αποτελέσματα. Ωσαύτως η χρήση της απλής σύντηξης, λόγω υπολογιστικού φορτίου, δεν αξίζει την προσπάθεια διότι ο τοπικός αισθητήρας δίνει ικανοποιητικά αποτελέσματα. Για τον λόγο αυτό επινοήθηκε η προσαρμοζόμενη μέθοδος σύντηξης ιχνών (adaptive track fusion) η οποία πριν εφαρμόσει κάποια από τις δύο μεθόδους εξετάζει με κάποια κριτήρια την σκοπιμότητα εφαρμογής της Απλής ή της Κατανεμημένου βάρους Σύντηξης.
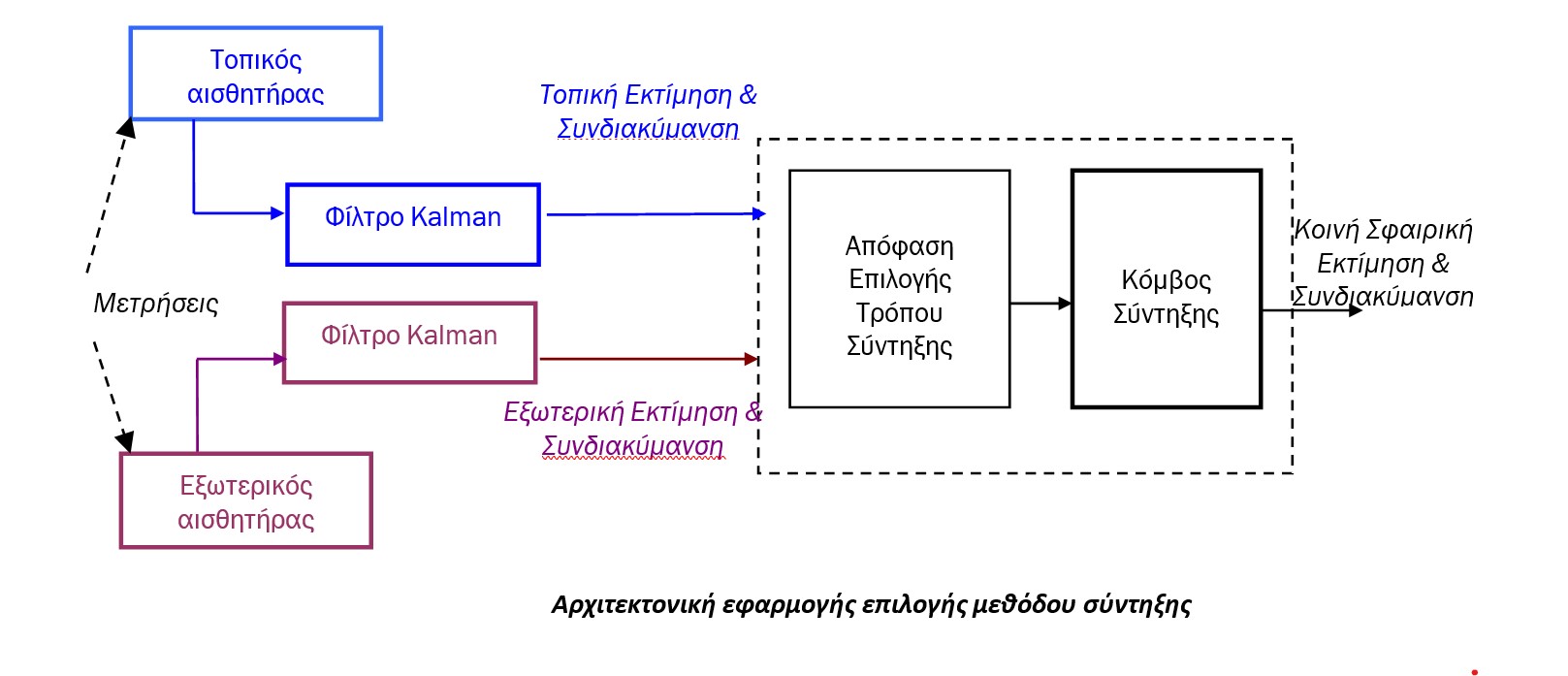
Επιπλέον των ανωτέρω υπενθυμίζεται ότι η ακρίβεια παρακολουθήσεως που προσφέρει ένας αλγόριθμος Σύντηξης Ιχνών (ακόμη και η Σύντηξη με κατανεμημένου βάρους Συνδιακύμανση) επηρεάζεται από τον Κοινό Θόρυβο Διαδικασίας (Common Process Noise), και την συνολική ταχύτητα μεταδόσεως στοιχείων (data rate) δια μέσω του επικοινωνιακού δικτύου. Η αρχιτεκτονική εφαρμογής επιλογής της μεθόδου σύντηξης παρουσιάζεται στο παρακάτω σχήμα το οποίο στην ουσία είναι το σχήμα της κατανεμημένης σύντηξης με τοπική επεξεργασία τροποποιημένο.
Κατηγορία #2: Οι αλγόριθμοι που βασίζονται στην θεωρία Πιθανοτήτων και ειδικότερα στον Νόμο του Bayes.
Η προσέγγιση αυτή είναι καθαρά μαθηματική και ο αναγνώστης θα πρέπει να ανατρέξει στο πλήρες κείμενο από το οποίο θα γίνει εμφανές ότι η Σύντηξη «Bayes» δεν είναι μία αμιγής μέθοδος σύντηξης. Στην ουσία είναι μία μέθοδος σύνδεσης και αναγνώρισης ιχνών αφήνοντας τους μαθηματικούς υπολογισμούς της εκτιμώμενης θέσης του στόχου σε κάποια από τις άλλες μεθόδους σύντηξης της Κατηγορίας #1.
Κατηγορία #3: Οι αλγόριθμοι οι οποίοι βασίζονται στην θεωρία των«Dempster–Shafer η οποία πραγματεύεται νέες προσεγγίσεις περί αβεβαιότητας.
Όπως είναι γνωστό, στη Θεωρία των Πιθανοτήτων, συμπεριλαμβανομένου του Νόμου του Bayes, θεωρείται ότι κάποιο γεγονός «είναι ή δεν είναι αληθές» και ορίζονται αντίστοιχα οι πιθανότητες των δύο γεγονότων το άθροισμα των οποίων είναι 1. Για παράδειγμα «μία πόρτα είναι είτε ανοικτή ή κλειστή», με αντίστοιχες πιθανότητες P{ανοικτή} = 0,6 και P{κλειστή} = 0,4 με συνολικό άθροισμα P{ανοικτή} + P{κλειστή} = 1.
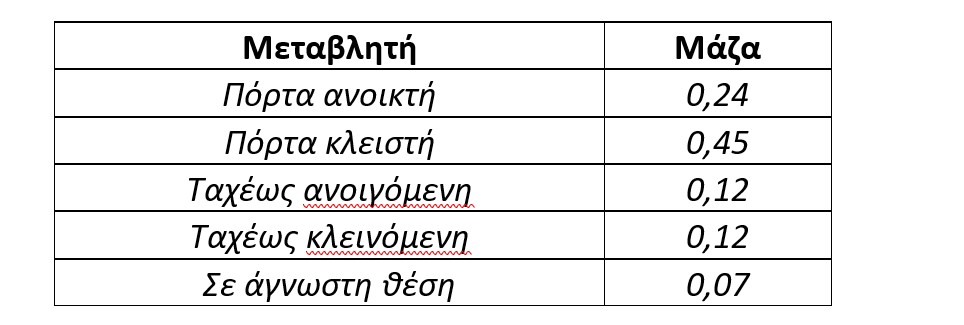
Η θεωρία των Αυστραλών Dempster–Shafer κατ’ αρχάς, εκτός από τις κοινές μεταβλητές (π.χ. ανοικτή ή κλειστή πόρτα), επιτρέπει και την χρήση άλλων μεταβλητών με σχετικά νεφελώδεις έννοιες όπως π.χ. την έννοια της «άγνωστης θέσης της πόρτας – unknown» ή την έννοια της «ταχέως ανοιγόμενης πόρτας» οι οποίες μαζί με τις υπόλοιπες κοινές μεταβλητές αποτελούν το συνολικό Σετ Ισχύος – Power Set και συνοδεύονται από ένα συντελεστή βαρύτητας αποκαλούμενο Μάζα – mass. Για παράδειγμα ένα τυπικό σετ Ισχύος της προαναφερθείσης «πόρτας» μπορεί να είναι:
Η μάζα, παρά την διαφορετική ονομασία, ουσιαστικά πρέπει να αντιμετωπίζεται με την έννοια της πιθανότητας. Ο καθορισμός της μάζας σε κάθε μία από τις μεταβλητές του σετ ισχύος βασίζεται τόσο σε υπολογισμούς από προηγούμενες παρατηρήσεις όσο και σε νέες παρατηρήσεις, σύμφωνα με τον συνδυαστικό νόμο που προτείνει η θεωρία Dempster-Shafer.
Εκτός από τις μάζες, η θεωρία των Dempster-Shafer εισάγει και δύο ακόμη έννοιες αυτές της Υποστήριξης – Support και της Ευλογοφάνειας – Plausibility. Η έννοιες της Υποστήριξης και της Ευλογοφάνεια είναι και αυτές μάζες (δηλαδή πιθανότητες) και εμφανίζονται ως ένα είδος «χαλαρού κάτω (lower) και χαλαρού πάνω (upper) ορίου της αβεβαιότητας» αντίστοιχα. Δηλαδή η μάζα (πιθανότητα) της μεταβλητής κείται κάπου μεταξύ ενός κάτω ορίου που ονομάζεται Υποστήριξη και ενός πάνω ορίου που ονομάζεται Ευλογοφάνεια.
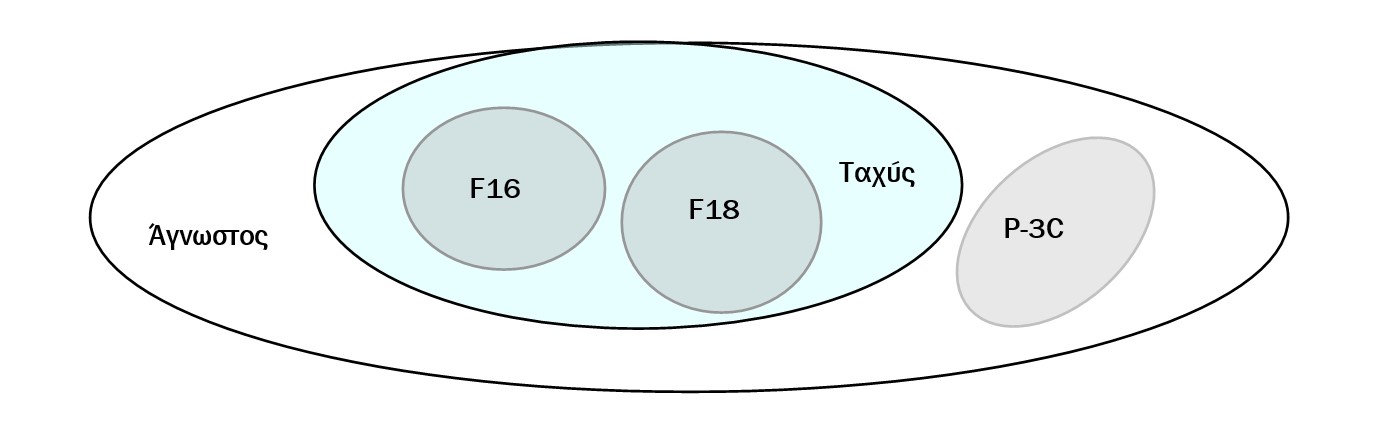
Σε ένα πιο συγκεκριμένο παράδειγμα από τον αντιαεροπορικό έλεγχο, έστω ότι έχουμε τρεις μεταβλητές, δηλαδή τρία αεροσκάφη F16, F18 και P3C. Στο σετ ισχύος της θεωρίας Dempster- Shafer θα μπορούσαν να προστεθούν και οι μεταβλητές «ταχύς στόχος», «άγνωστος στόχος».
Η Υποστήριξη – Support θα μπορούσε να είναι ένα κάτω όριο ταχύτητας (π.χ. 130 Knots) και αντίστοιχα η Ευλογοφάνεια – Plausibility ένα πάνω όριο ταχύτητας (π.χ. 1.200 Knots).
Η προσέγγιση Dempster- Shafer είναι καθαρά μαθηματική και ο αναγνώστης θα πρέπει να ανατρέξει στο πλήρες κείμενο από το οποίο θα γίνει εμφανές ότι αυτή η Σύντηξη δεν είναι μία αμιγής μέθοδος σύντηξης. Στην ουσία είναι μία μέθοδος σύνδεσης και αναγνώρισης ιχνών αφήνοντας τους μαθηματικούς υπολογισμούς της εκτιμώμενης θέσης του στόχου σε κάποια από τις άλλες μεθόδους σύντηξης της Κατηγορίας #1.
Κατηγορία #4: Οι αλγόριθμοι που βασίζονται στην θεωρία Fuzzy Logic.
Η θεωρία «Fuzzy Logic» βασίζεται στην θεωρία των Συνόλων και περιστρέφεται γύρω από την ιδέα της «συναρτήσεως συμμετοχής μέλους – membership function».
Η προσέγγιση αυτή είναι καθαρά μαθηματική και ο αναγνώστης θα πρέπει να ανατρέξει στο πλήρες κείμενο από το οποίο θα γίνει εμφανές ότι η Σύντηξη «Fuzzy Logic» δεν είναι μία αμιγής μέθοδος σύντηξης. Στην ουσία είναι μία μέθοδος σύνδεσης και αναγνώρισης ιχνών αφήνοντας τους μαθηματικούς υπολογισμούς της εκτιμώμενης θέσης του στόχου σε κάποια από τις άλλες μεθόδους σύντηξης της Κατηγορίας #1.
Η εφαρμογή της Fuzzy Logic στην Σύντηξη θα εξετασθεί μέσω ενός συστήματος παρακολούθησης, αναγνώρισης και διατήρησης των ιχνών (tracks) αριθμού πλοίων σε κάποια περιοχή που ελέγχεται από δύο ραντάρ, π.χ. ένα ραντάρ επιφανείας και από ένα ραντάρ αεροσκάφους.
Παράδειγμα Σύντηξης Fuzzy Logic
Δύο ραντάρ με διαφορετικά πρωτόκολλα επικοινωνίας αποστέλλουν στον Κόμβο Σύντηξης τις επαφές τους (plots). Οι επαφές είναι πολλές, αφορούν πολλούς στόχους και δεν είναι εύκολο να συντηχθούν αφού δεν είναι γνωστό ποιες επαφές αφορούν τον ίδιο στόχο. Για να συνδέσει (associate) τις αποστελλόμενες από τα ραντάρ επαφές με τα υπάρχοντα ίχνη των στόχων (tracks), ο Κόμβος Σύντηξης, δημιουργεί τις Συναρτήσεις Μέλους π.χ. για τις ηλεκτρομαγνητικές παραμέτρους και τις κινηματικές παραμέτρους των στόχων. Έτσι για μία νέα επαφή από κάποιο ραντάρ ο κόμβος Σύντηξης πρέπει να αποφασίσει εάν ανήκει ή όχι σε κάποιο υπάρχοντα στόχο ελέγχοντας την απόσταση μεταξύ επαφής και εκτιμώμενης θέσης του στόχου. Προφανώς για διαφορά αποστάσεως ίση με το μηδέν είναι αρκετά πιθανό η νέα επαφή ραντάρ να ανήκει στον ήδη παρακολουθούμενο στόχο. Επομένως αυτή η επαφή ραντάρ μπορεί να είναι ένα μέλος ενός Fuzzy συνόλου θέσεως που συνδέεται με τον στόχο και του οποίου η Συνάρτηση Μέλους μεγιστοποιείται για απόσταση μεταξύ επαφής και στόχου ίση με μηδέν.
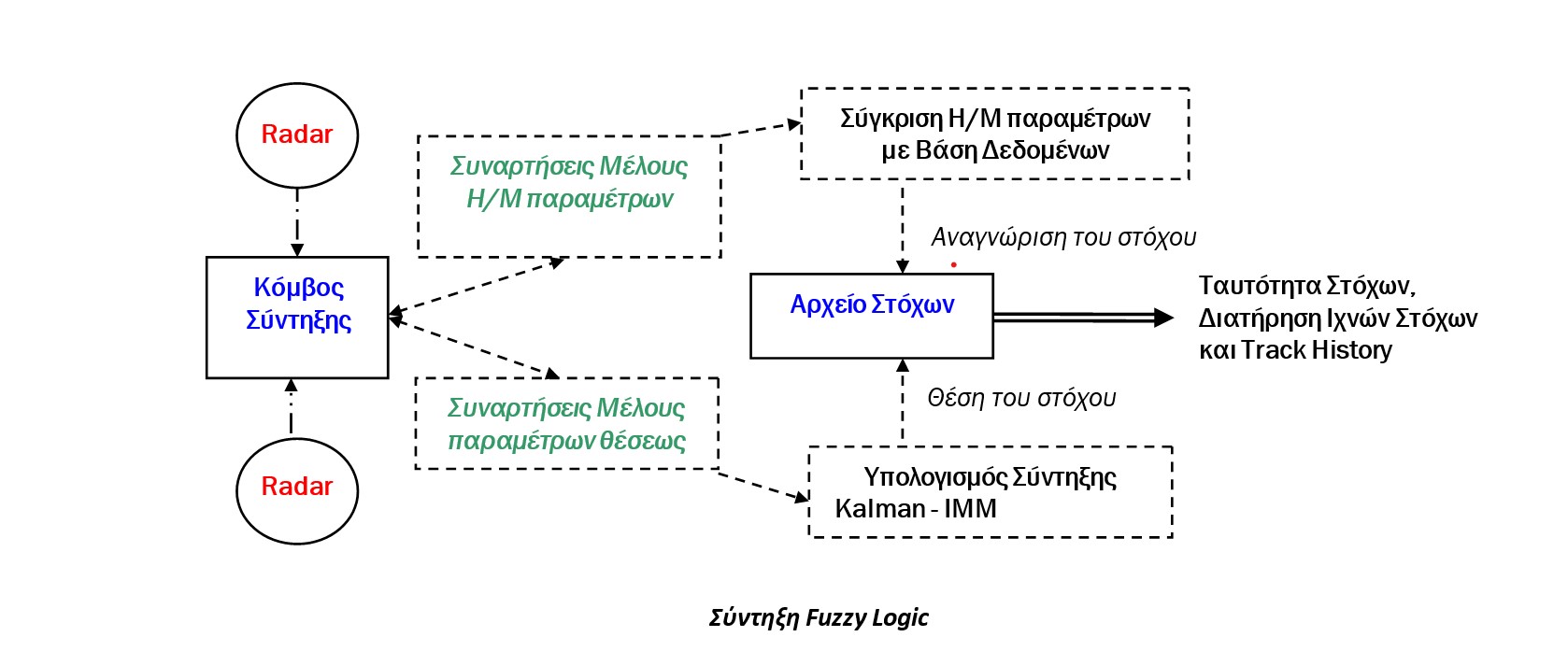
Όταν από τα αποτελέσματα των Συναρτήσεων Μέλους διαπιστωθεί ότι το κάθε ραντάρ έχει στείλει μία επαφή για κάθε στόχο, ο κόμβος Σύντηξης χρησιμοποιεί κάποιο φίλτρο Kalman ή ΙΜΜ σαν μηχανή σύντηξης των επαφών, καθορίζει την θέση του στόχου και δημιουργεί ένα κοινό αρχείο στόχων (Track File). Στην συνέχεια ο κόμβος Σύντηξης, έχοντας δημιουργήσει το κοινό Αρχείο Στόχων, συμβουλεύεται κάποια βάση δεδομένων – database προκειμένου να βρει μία υποψήφια πλατφόρμα (π.χ. πλοίο) η οποία παρήγαγε τον στόχο ενδιαφέροντος. Ηλεκτρομαγνητικές παράμετροι (π.χ. pulse width, PRF κλπ) είναι δυνατόν να ορισθούν σαν μέλη ενός άλλου Fuzzy συνόλου με διάφορα ραντάρ. Η σύγκριση των εν λόγω παραμέτρων οδηγεί σε αναγνώριση του στόχου και την διατήρηση της επαφής στις επόμενες μετρήσεις.
Σε μία πιο απλουστευμένη κατάσταση, ως παρακάτω σχήμα, έστω το ίχνος ενός στόχου παρακολουθείται από χρόνο t1 έως t5 και αναμένονται οι παρατηρήσεις του χρόνου t6 προκειμένου να υπολογισθεί η νέα του φιλτραρισμένη θέση σε χρόνο t6. Ο Κόμβος Σύντηξης, για κάθε χρονική στιγμή και φυσικά στον χρόνο t5 για τον χρόνο t6 σχημάτισε τις Συναρτήσεις Μέλους με βάση τις κινηματικές παραμέτρους του στόχου.
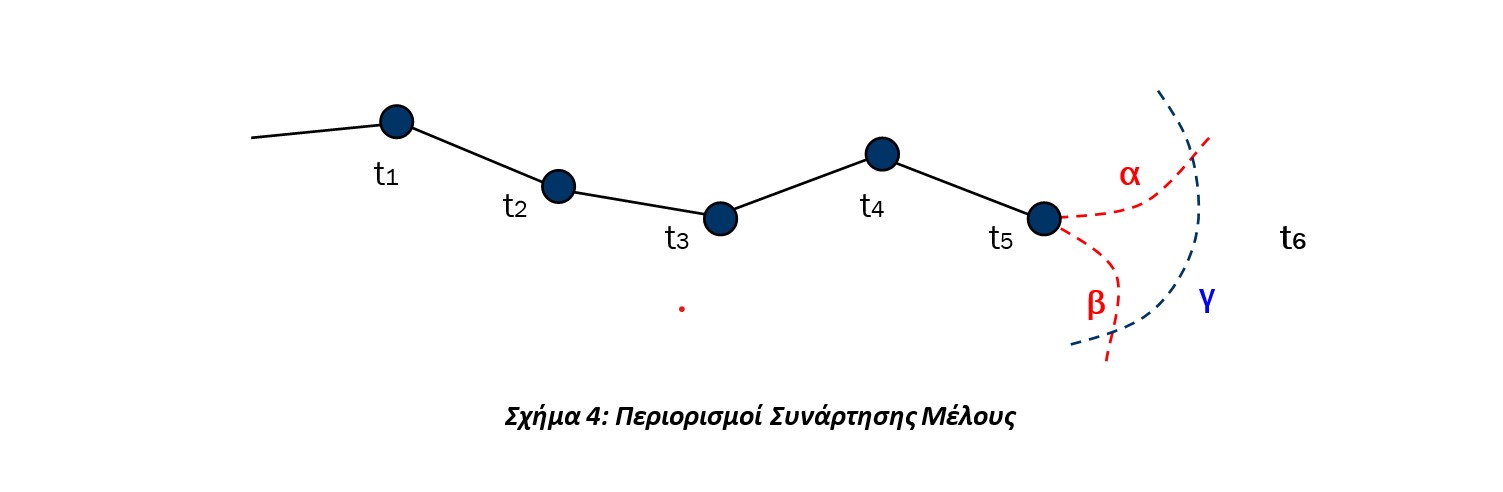
Η Συνάρτηση Μέλους της επιτάχυνσης του στόχου δεν του επιτρέπει αλλαγές πορείας μεγαλύτερες από τις καμπύλες α και β του σχήματος4. Παράλληλα η Συνάρτηση Μέλους της αποστάσεως που διανύει ο στόχος μεταξύ δύο χρονικών στιγμών δεν του επιτρέπει να κινηθεί έξω από την καμπύλη γ του σχήματος. Αυτές οι συναρτήσεις μέλους δίνουν την δυνατότητα σύνδεσης μιας μετρήσεως με κάποιο συγκεκριμένο στόχο. Συνεπώς οι Συναρτήσεις Μέλους λειτουργούν σαν ένα είδος συνδυασμένης πύλης (gating) που στο παραπάνω παράδειγμα ορίζεται από τις καμπύλες α, β και γ.
Από την στιγμή που διατίθεται μία υποψήφια πλατφόρμα (π.χ. Φ/Γ Έλλη) για κάθε ένα ίχνος, απαιτείται πλέον Σύντηξη των επερχομένων επαφών με τα προηγούμενα στοιχεία της πλατφόρμας (Track History). Η τελική εικόνα που προσφέρει ο Κόμβος Σύντηξης είναι η απεικόνιση στο χάρτη της περιοχής όλων των στόχων με τις προηγούμενες θέσεις τους και την ταυτότητά τους.
Η μέθοδος της Σύντηξης με βάση την θεωρία της Fuzzy Logic δεν είναι αρκετά δημοφιλής στους χρήστες συστημάτων ΜΤΤ κυρίως λόγω της δυσκολίας καθορισμού των Fuzzy συνόλων και των αντίστοιχων Συναρτήσεων Μέλους. Επιπλέον αυτού δεν είναι εύκολα κατανοητή η συσχέτιση π.χ. μίας Συναρτήσεως Μέλους για την «απόσταση της επαφής με ένα στόχο» με μία Συνάρτηση Μέλους για την «Συχνότητα Επαναλήψεως Παλμών ενός ραντάρ του στόχου».
Οι αλγόριθμοι Σύντηξης κατά Bayes, Dempster – Shafer και Fuzzy Logic δεν είναι αμιγείς μέθοδοι σύντηξης. Στην ουσία είναι μέθοδοι σύνδεσης και αναγνώρισης ιχνών τα οποία ανήκουν στον ίδιο στόχο και στην πράξη αφήνουν τους μαθηματικούς υπολογισμούς της σύντηξης σε κάποια φίλτρα Kalman, IMM, ΜΜΑΕ (Κατηγορία #1).

Σύντηξη Εικόνας, Image Fusion – IF
Εκτός από την Σύντηξη στοιχείων (Data Fusion) η οποία παρουσιάσθηκε στις προηγούμενες παραγράφους, σημειώνεται ότι υπάρχει και ο όρος Σύντηξη Εικόνας (Image Fusion – IF) το αντικείμενο της οποίας είναι να ολοκληρώνει εικόνες από πολλούς αισθητήρες…
Η συνέχεια στο Naval Defence